




Force/torque controlled handling
in current series production
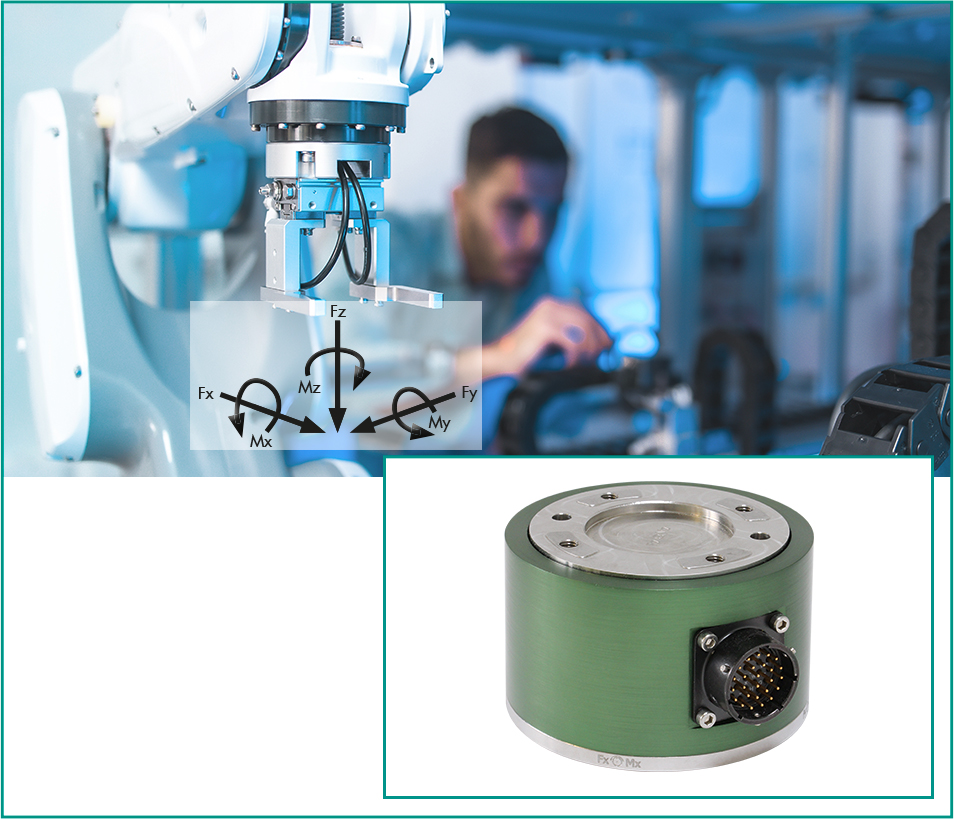

- Measuring ranges:
- Load: Fx = 1 kN / Fy = 1 kN / Fz = 2 kN
- Torque: Mx / My / Mz = 50 Nm - Low non-linearity from 0.1 % F.S.
- Customized axis configuration
- Robot flange according to DIN ISO 9049-1
Task
In a robot-controlled placement process, conclusions are to be drawn during the process about the correct parts, positioning and placement.
By means of a reference run, the forces and moments are recorded and serve as comparison parameters for the automated process. The distribution of the three forces and three torques provides information on completeness and alignment.
The placement process of workpiece carriers can be controlled, monitored and limited to maximum values, thus eliminating damage and rejects.
Go to product 8565
Go to product 9206
Go to product 9250
Go to product 9251
Sectors
![]()
![]()
![]()
![]()
![]()







